Industrial Robot- Kinematic Structures
Introduction:
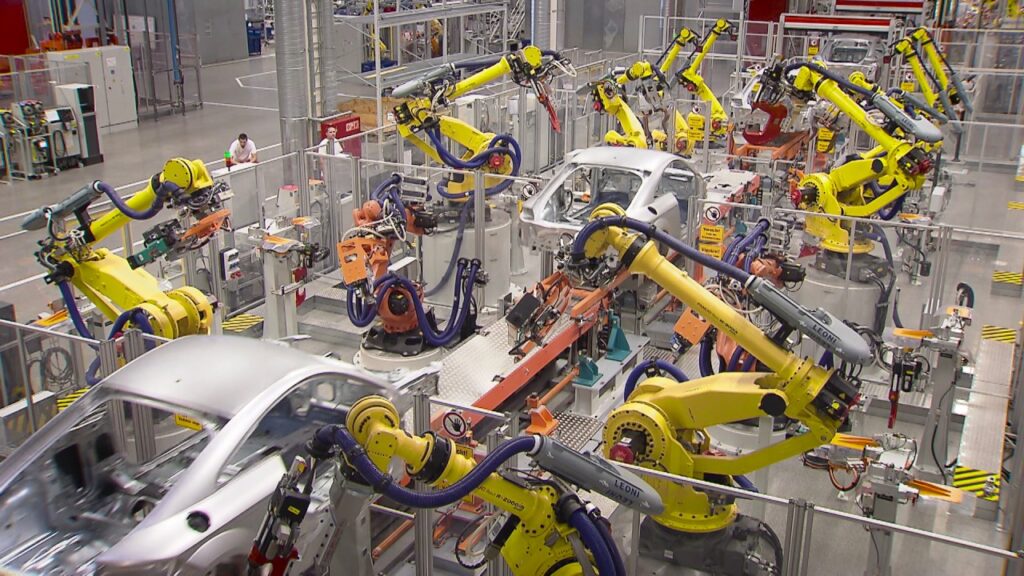
In this article, we will delve into the fascinating world of industrial robots and explore the various types of kinematic structures that are used in their design. Industrial robots have revolutionized numerous industries by automating complex and repetitive tasks, increasing efficiency, and improving product quality. Professor T. Asokan from the Department of Engineering Design at IIT Madras provides us with valuable insights and knowledge in his lecture on industrial robot kinematic structures.
Understanding Kinematic Structures:
Kinematic structures refer to the arrangement of components in an industrial robot that enables its motion. Professor T. Asokan points out that there are mainly five types of kinematic structures commonly used in industrial robots. These include:
1. Cartesian Robots:
Cartesian robots, also known as rectilinear or gantry robots, have three linear joints that allow movement along the X, Y, and Z axes. These robots are highly precise and find applications in pick-and-place operations, welding, and material handling.
2. Cylindrical Robots:
Cylindrical robots have two rotary joints and one linear joint, resembling a cylindrical shape. This structure enables them to perform rotational and linear movements simultaneously. These robots are popular in tasks requiring a combination of arc welding, machine loading, and assembly operations.
3. Spherical Robots:
Spherical robots, also known as polar robots, have one rotary joint at the base and two rotary joints at the end effector, allowing movement in a spherical manner. These robots are ideal for applications requiring a high degree of dexterity and flexibility, such as painting, assembly, and inspection tasks.
4. SCARA Robots:
SCARA stands for Selective Compliance Assembly Robot Arm. These robots have two rotary joints and one linear joint, offering a good combination of speed and precision. SCARA robots excel in tasks that require vertical assembly, material handling, and packaging.
5. Articulated Robots:
Articulated robots have multiple rotary joints, enabling a wide range of motion similar to a human arm. These robots are highly versatile and find applications in welding, material handling, painting, and assembly operations.
Comparative Analysis:
Now that we’ve explored the different types of kinematic structures, let’s dive deeper into their unique characteristics, applications, and advantages.
Cartesian robots are known for their high precision and ability to handle heavy loads. They excel in applications such as CNC machining, 3D printing, and material handling in factories.
Cylindrical robots, with their combined linear and rotary motions, are well-suited for tasks like machine loading, gluing, and sealing operations. Their compact design allows them to fit into confined spaces, making them suitable for smaller work areas.
Spherical robots, with their ability to move in all directions, are perfect for complex tasks like painting intricate patterns, assembling delicate components, and inspecting large objects.
SCARA robots, with their selective compliance and fast speed, are often used in pick-and-place operations, packaging, and assembly lines. Their compact design and precise movements make them highly efficient in high-speed applications.
Articulated robots, being the most versatile, are widely used in diverse industries. Their ability to mimic human arm movements makes them suitable for tasks such as welding, material handling, and even surgical procedures in the medical field.
Conclusion:
Industrial robots have transformed various industries, reducing labor costs, increasing efficiency, and improving product quality. Understanding the different types of kinematic structures helps us appreciate the unique characteristics and applications of each robot. Professor T. Asokan’s lecture on industrial robot-kinematic structures provided valuable insights into this topic, expanding our knowledge and understanding of this fascinating field.
It is essential for companies to carefully analyze their specific requirements and choose the most appropriate kinematic structure for their industrial robots. From precise Cartesian robots to versatile articulated robots, each structure offers unique advantages and capabilities. By harnessing the power of industrial robots, companies can enhance productivity, elevate product quality, and thrive in today’s competitive market.
As we look to the future, it is evident that industrial robots will continue to play a significant role in further automating industries across the globe. The advancements in kinematic structures and robot capabilities will pave the way for even more efficient and intelligent robots, revolutionizing industries beyond our imagination.
References:
– Types of Industrial Robots. (n.d.). Lecture – 2.3 – Industrial Robot- Kinematic Structures. [Video file]. Retrieved from [YouTube link]
Disclaimer: This article is based on the lecture by Professor T. Asokan from IIT Madras and is for informational purposes only.
Industrial Robot
“Exploring Industrial Robot Kinematic Structures and Types: A Comprehensive Lecture on the Intricacies of Industrial Robotics”