**[Explanatory Style]**
—
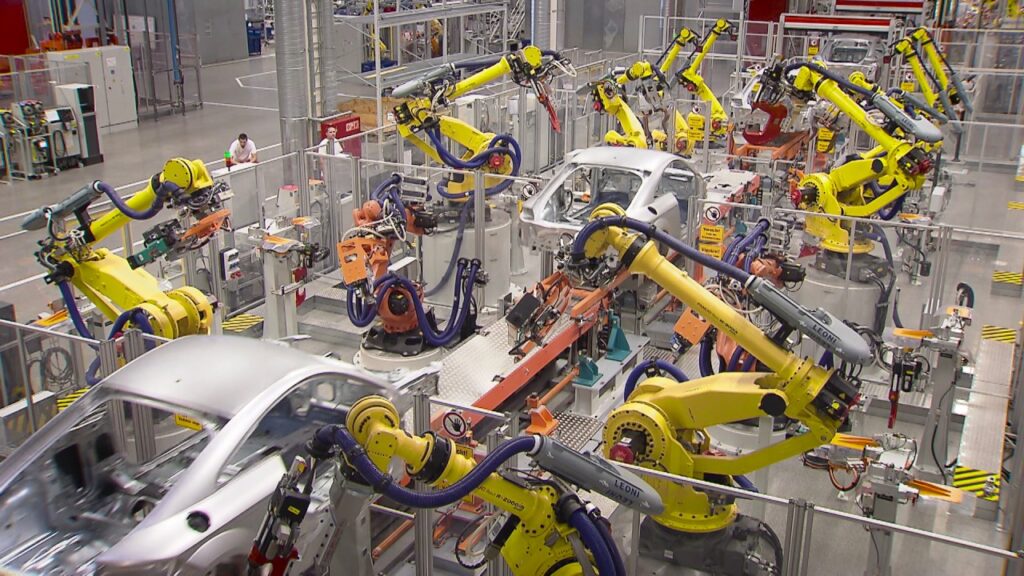
Robots have become an integral part of our lives, particularly in the industrial sector where they play a crucial role in increasing productivity, efficiency, and safety. However, not all robots are created equal, and they come in different types and configurations, each serving a specific purpose. In this article, we will explore the different physical configurations of industrial robots and their applications.
1. **Articulated Robots**
Articulated robots are the most common type of industrial robots. They are characterized by their rotary joints, allowing them to have a wide range of motion similar to a human arm. Typically, these robots consist of a series of interconnected links, each connected by a joint. This configuration provides a high degree of flexibility, making them suitable for various applications such as welding, material handling, assembly, and painting.
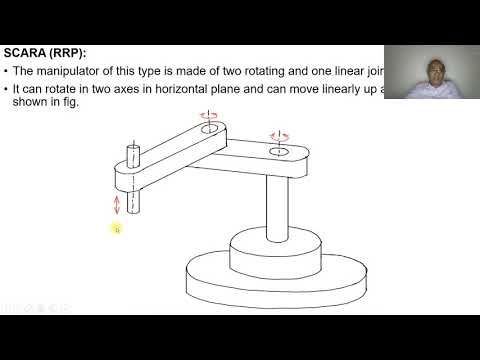
2. **SCARA Robots**
SCARA stands for “Selective Compliance Assembly Robot Arm.” Unlike articulated robots, SCARA robots have parallel joints instead of rotary joints, giving them a unique configuration. This design provides both vertical and horizontal movements, similar to a human arm. SCARA robots are commonly used in applications that require precise pick-and-place operations, such as assembly lines, packaging, and electronics manufacturing.
3. **Cartesian Robots**
Cartesian robots, also known as gantry robots, move along three linear axes and use Cartesian coordinates to define their motion. They are composed of sliding arms or a combination of beams and columns, providing precise and repetitive movements in a rectangular coordinate system. Cartesian robots excel in applications that require heavy lifting, such as material handling, packaging, and machining.
4. **Delta Robots**
Delta robots are known for their speed and precision. They consist of three arms connected to a common base, forming a triangular configuration. The end effector is attached to the three arms through universal joints, allowing for precise and rapid movements. Delta robots are commonly used in tasks that require high-speed pick-and-place operations, such as packaging, sorting, and assembly.
5. **Cylindrical Robots**
Cylindrical robots have a configuration similar to a human arm but with a cylindrical coordinate system instead of Cartesian coordinates. They consist of a prismatic joint for vertical movement and a rotary joint for horizontal movement. Cylindrical robots are often employed in applications such as welding, machine loading, machine tending, and material handling.
6. **Polar Robots**
Polar robots, also known as spherical robots, have a unique configuration that resembles a robotic arm attached to a rotating base. Their movement is defined in a spherical coordinate system, allowing for a wide range of motion. Polar robots are commonly used for applications such as painting, spot welding, and die casting.
Each of these robot configurations has its advantages and disadvantages, making them suitable for specific tasks in various industries. While articulated robots provide flexibility, SCARA robots offer precise pick-and-place operations. Cartesian robots excel in heavy lifting, while Delta robots are ideal for high-speed tasks. Cylindrical robots find their application in welding and material handling, and polar robots are well-suited for painting and spot welding.
In conclusion, the types of industrial robots and their physical configurations play a vital role in determining their suitability for different tasks in the manufacturing industry. Companies must carefully consider the requirements of their operations and choose the appropriate robot configuration that aligns with their needs. The advancements in robot technology continue to push the boundaries of what robots can achieve, and it is fascinating to witness the impact they have on increasing productivity and efficiency in various industries.
*Note: The information provided in this article is based on research and general knowledge of industrial robot configurations. Specific details may vary depending on the manufacturer, model, and application requirements.*
Industrial Robot
“Exploring 6 Robot Physical Configurations: A Guide to Types of Industrial Robots”