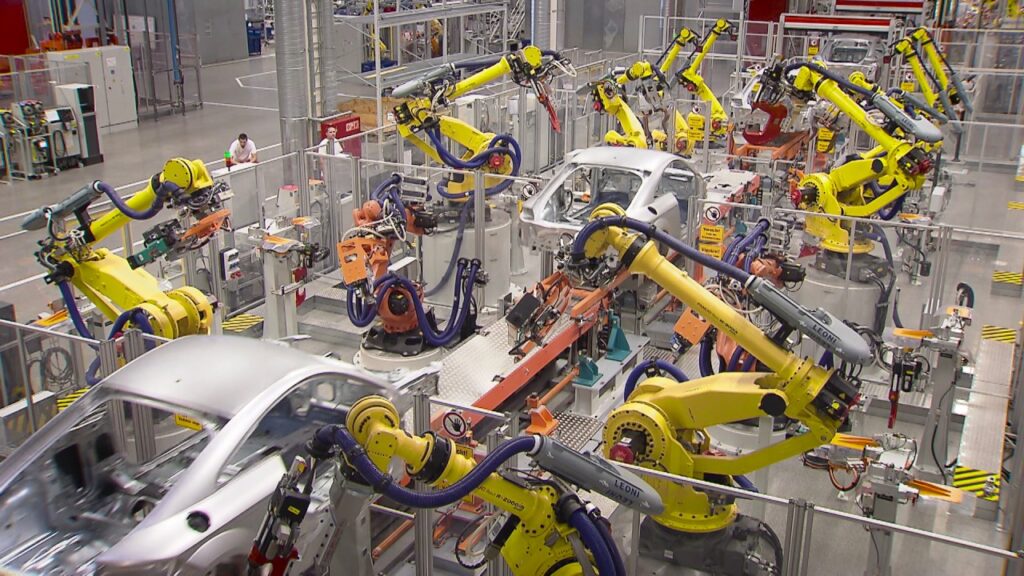
Industrial robotics has revolutionized the manufacturing sector, making it more efficient, precise, and cost-effective. These advanced machines have the ability to perform a wide range of tasks with precision and accuracy, helping businesses streamline their operations and increase productivity. In this article, we will delve into the different types of industrial robots and explore the intricacies of wrist configuration and joint notation.
Industrial robots are classified into several categories based on their functionality and application. These robots can be broadly categorized into six types: articulated robots, cartesian robots, SCARA robots, cylindrical robots, delta robots, and polar robots.
Articulated robots are the most common type of industrial robot and are known for their versatility and range of motion. They consist of a series of connected joints or links that allow the robot to mimic the movement of a human arm. Articulated robots are commonly used in welding, material handling, and assembly operations.
Cartesian robots, also known as gantry robots, operate on a three-axis system. They have a simple design and linear movements along the X, Y, and Z axes. Cartesian robots are often used in applications that require precise positioning, such as pick and place operations in the semiconductor industry.
SCARA robots, which stands for Selective Compliance Assembly Robot Arm, are designed for fast and precise horizontal movements. These robots have a rigid structure that allows them to maintain high precision while performing tasks such as assembly and handling operations.
Cylindrical robots have a cylindrical workspace and are often used for tasks that require long-reaching movements. These robots consist of a single rotating joint and a linear slide that enables them to perform tasks such as machine loading and unloading.
Delta robots, also known as parallel-link robots, are renowned for their incredible speed and precision. They are commonly used in applications that require high-speed pick and place operations, such as packaging and sorting.
Polar robots have a spherical workspace and are capable of performing tasks in a 360-degree radius. These robots are often utilized in tasks such as painting, welding, and material handling.
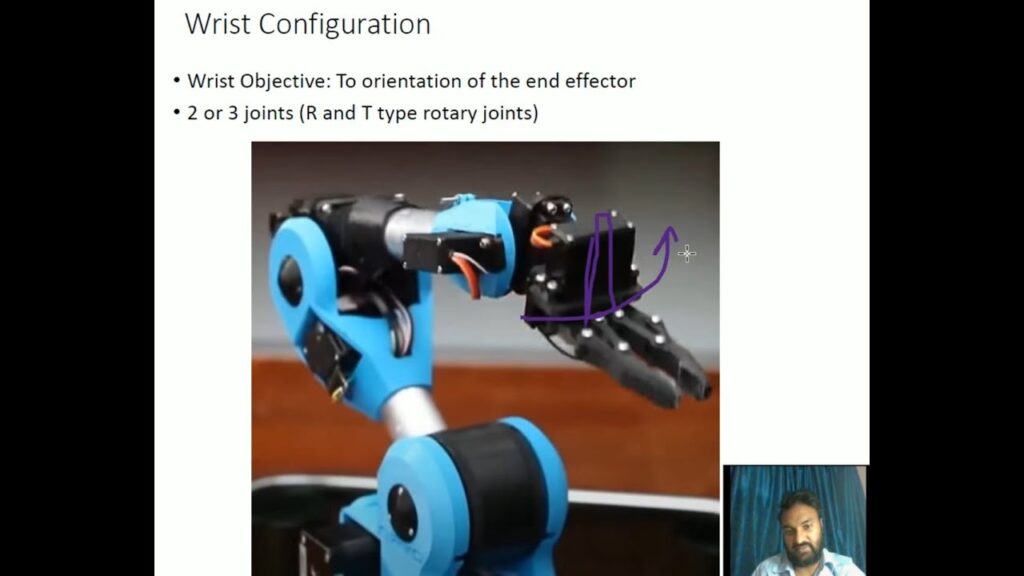
Understanding the wrist configuration of industrial robots is crucial to their operation. The wrist of a robot consists of three rotational axes: pitch, roll, and yaw. Pitch refers to the up and down movement, roll refers to the side to side movement, and yaw refers to the rotation around the vertical axis.
The wrist configuration of a robot allows it to maneuver in various orientations, facilitating complex tasks and increasing efficiency. By utilizing different combinations of pitch, roll, and yaw, robots can adapt to different workpieces and perform tasks with precision.
To accurately describe the movement and positioning of the robot's joints, a joint notation system is used. The joint notation system uses symbols such as R and T to represent the types of joints in the arm and wrist of the robot. The joint notation system allows engineers and operators to understand the capabilities and limitations of the robot and program it accordingly.
In conclusion, industrial robots have revolutionized the manufacturing sector by increasing efficiency, precision, and productivity. Understanding the different types of industrial robots and their wrist configuration is essential for optimizing their performance and capabilities. By utilizing advanced technologies and intelligent programming, these robots are transforming the manufacturing landscape and enabling businesses to stay competitive in the global market.
Industrial Robot
"Exploring Industrial Robotics: Wrist Configurations, Joint Notation, and Types of Robots for Effective Automation"